SnowEx Hackweek - GPR and Lidar Tutorial#
Outline:#
GPR Methods for the Retrieval of Snow Depth and SWE
Lidar Methods for Snow Depth Retrieval and SWE Estimation
Leveraging Coincident GPR and Lidar Data Sets to Derive Snow Density
SnowEx23 GPR/Lidar Derived Permittivities/Densities in the Boreal Forest, Alaska
Discussion: Improving Density Estimation
GPR SnowEx Analysis-Ready Datasets
References
1. GPR Methods for the Retrieval of Snow Depth and SWE#
Previous GPR tutorial developed by Tate Meehan (CRREL) that may be of interest: https://snowex-2021.hackweek.io/tutorials/gpr/gpr.html#
SnowEx Review#
Ground-based, airborne, and satellite radars were operated as part of the NASA SnowEx campaigns.
Ground-based radars included ground-penetrating radar (GPR), frequency-modulated continuous-wave radar (FMCW), and tower mounted radars.
What airborne and satellite radars were tasked?
A Brief Blurb on Radar Physics#
Radar is fully transmissible in dry snow, but there is frequency-dependent interaction between the radar signal and the snowpack.
At L-band frequencies (1–2 GHz, ~25 cm wavelength) there limited to no interaction with the snowpack.
What is GPR?#
We use L-band GPR, which was operated during all SnowEx campaigns!
GPR transmits a radar signal into the snowpack, which then reflects off objects/interfaces with contrasting dielectric permittivity. The GPR records the amplitude and two-way travel time (twt) of the reflections.
Dielectric permittivity refers to the dielectric properties of the snowpack that define how EM energy transmits through the medium.
Usually, we are interested in the snow-ground interface and we measure the snowpack thickness in twt (nanoseconds).
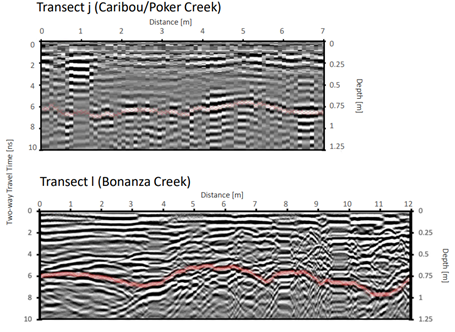
However, in complex vegetation, radargrams are difficult to interpret! Causes increased uncertainty.
See radargram examples below for the boreal forest GPR surveys (credit Kajsa Holland-Goon).
Snow Depth, SWE, and Density Calculations#
To calculate snow depth \((d_s)\) from twt, we need to estimate the relative permittivity \((\epsilon_s)\) and radar velocity \((v_s)\) of the snowpack:
\(v_s = \frac{c}{\sqrt{\epsilon_s}}\); –> Where c is the velocity of EM energy in a vacuum.
\(\epsilon_s = (1+\frac{0.845\rho_s}{1000})^2\); –> Kovacs et al. (1995), but more than 19 equations exist for dry snow conditions.
\(d_s = \frac{twt}{2}*v_s;\)
\(SWE = d_s\rho_s;\)–> Where SWE is snow water equivalent.
But…If we know the snow depth, we can constrain the radar velocity and estimate relative permittivity and density!
\(\epsilon_s=(\frac{c*twt}{2d_s})^2\)
\(\rho_s=(\sqrt{\epsilon_s}-1)\frac{1000}{0.845}\)
How can we find the snow depth?
A Shameless Plug…#
Most analysis-ready GPR products have twt, snow depth, and snow water equivalent. Some have been updated with derived snow densities. See 6. SnowEx GPR Analysis-Ready Datasets below.
2. Lidar Methods for Snow Depth Retrieval and SWE Estimation#
Previous lidar tutorial developed by Naheem Adebisi (ESRI) that may be of interest: https://snowex-2022.hackweek.io/tutorials/lidar/index.html#
A (Very) General Review of Lidar#
Lidar emits photons and measures the twt of the returned photons
These twt are converted to elevation surfaces (e.g., DEM, DTM, DSM).
Lidar can be collected from a variety of platforms:
Terrestrial
UAV
Airborne
Satellite
Two acquisitions are required for snow, a snow-on acquisition and a snow-off acquisition. Snow depth can be calculated in two general ways:
Raster-based approaches (see figure below, credit Airborne Snow Observatories Inc.)
Point cloud approaches
How is SWE calculated from lidar snow depths?#
At larger scales, SWE is calculated via modeled densities (e.g., M3 Works and ASO).
At smaller field sites, it may be appropriate to use representative in situ measurements.
3. Leveraging Coincident GPR and Lidar Data Sets to Derive Snow Density#
Density, liquid water content, and relative permittivity are understudied relative to snow depth and/or SWE.
Combined coincident snow depths and twt can yield spatially distributed measurements of relative permittivity.
In wet snow, relative permittivity can be converted to liquid water content (e.g., Webb et al., 2018, 2020, 2022; Bonnell et al., 2021).
In dry snow, density can be estimated from the relative permittivity (Yildiz et al., 2021; McGrath et al., 2022; Bonnell et al., 2023; Meehan et al., 2024).
This technique has provided an unprecedented glimpse into the spatial properties of these parameters!
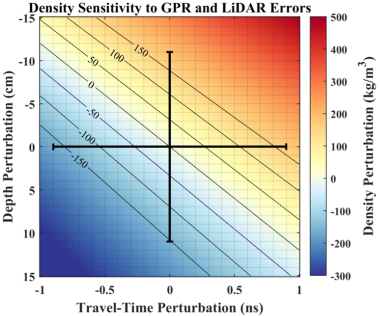
Critically, studies have noted a large random error in derived products that should be considered (see figure below, credit: Meehan et al., 2024).
4. SnowEx23 GPR/Lidar Derived Permittivities/Densities in the Boreal Forest, Alaska#
Here, we will use this approach to derive densities at Farmer’s Loop Creamer’s Field during the SnowEx23 Alaska Campaign#
Lidar data was collected on 11 March 2023
GPR data was collected on 7, 11, 13, and 16 March 2023
#1.1 Load relevant packages
import os
import numpy as np
from datetime import date
from scipy.spatial import cKDTree
#packages for figures
import matplotlib.pyplot as plt
from rasterio.plot import show
#geospatial packages
import geopandas as gpd #for vector data
import xarray as xr
import rioxarray #for raster data
import pandas as pd
from shapely.geometry import box, Point
import rasterio as rio
#Import SnowEx database
from snowexsql.api import PointMeasurements, LayerMeasurements, RasterMeasurements
Part 1: Load the GPR data from the SnowEx data base#
-Huge thank you to Micah Johnson and Micah Sandusky for their support!
Note that if we used the full GPR/Lidar dataset, we would need to allocate way more memory. This example focuses on a single date of collection in very dense forest.
Examine the headers from the GPR csv –> what are the variables that we are interested in?
# 1.2 Load GPR data
#Note, memory space is fairly limited, will need to pull only one date
#Set a number of dates to pull GPR for
#dt1 = date(2023, 3, 7)
dt2 = date(2023, 3, 11)
#dt3 = date(2023, 3, 13)
#dt4 = date(2023, 3, 16)
#site1 = LayerMeasurements.from_filter(date=dt1, site_name='Fairbanks', site_id='FLCF', limit=1)
site2 = LayerMeasurements.from_filter(date=dt2, site_name='Fairbanks', site_id='FLCF', limit=1)
#site3 = LayerMeasurements.from_filter(date=dt3, site_name='Fairbanks', site_id='FLCF', limit=1)
#site4 = LayerMeasurements.from_filter(date=dt4, site_name='Fairbanks', site_id='FLCF', limit=1)
#Use pandas ot read in csv data
#gpr_df_dt1 = PointMeasurements.from_area(pt=site1.geometry[0], crs=26906, buffer=10000,
# type='two_way_travel',
# observers='Randall Bonnell',
# date=dt1, site_name='farmers-creamers',
# limit=29432)#The number of expected measurements
gpr_df_dt2 = PointMeasurements.from_area(pt=site2.geometry[0], crs=26906, buffer=10000,
type='two_way_travel',
observers='Randall Bonnell',
date=dt2, site_name='farmers-creamers',
limit=20213)#The number of expected measurements
#gpr_df_dt3 = PointMeasurements.from_area(pt=site3.geometry[0], crs=26906, buffer=10000,
# type='two_way_travel',
# observers='Randall Bonnell',
# date=dt3, site_name='farmers-creamers',
# limit=19024)
#gpr_df_dt4 = PointMeasurements.from_area(pt=site4.geometry[0], crs=26906, buffer=10000,
# type='two_way_travel',
# observers='Randall Bonnell',
# date=dt4, site_name='farmers-creamers',
# limit=15785)
#Compile into one dataframe
#flcf_gpr_df = pd.concat([gpr_df_dt1,gpr_df_dt2,gpr_df_dt3,gpr_df_dt4],axis=0, join='outer', ignore_index=True, keys=None, levels=None,names=None,verify_integrity=False,sort=False,copy=None)
flcf_gpr_df = gpr_df_dt2
#Print out the csv headers and initial entries --> What's important here and what do we need?
print(flcf_gpr_df.head())
version_number equipment value latitude longitude northing \
0 None None 2.750000 64.873587 -147.695533 7.194547e+06
1 None None 2.993355 64.873572 -147.695581 7.194546e+06
2 None None 2.842746 64.873572 -147.695580 7.194546e+06
3 None None 2.842746 64.873573 -147.695578 7.194546e+06
4 None None 2.918051 64.873573 -147.695576 7.194546e+06
easting elevation utm_zone geom ... \
0 467046.578651 None 6 POINT (467046.579 7194547.363) ...
1 467044.267331 None 6 POINT (467044.267 7194545.619) ...
2 467044.351761 None 6 POINT (467044.352 7194545.672) ...
3 467044.436181 None 6 POINT (467044.436 7194545.726) ...
4 467044.520600 None 6 POINT (467044.521 7194545.779) ...
date time_created time_updated id doi \
0 2023-03-11 2024-08-18 02:41:55.743293+00:00 None 7418603 None
1 2023-03-11 2024-08-18 02:41:55.743293+00:00 None 7418573 None
2 2023-03-11 2024-08-18 02:41:55.743293+00:00 None 7418574 None
3 2023-03-11 2024-08-18 02:41:55.743293+00:00 None 7418575 None
4 2023-03-11 2024-08-18 02:41:55.743293+00:00 None 7418576 None
date_accessed instrument type units \
0 2024-08-18 pulseEkko pro 1 GHz GPR two_way_travel ns
1 2024-08-18 pulseEkko pro 1 GHz GPR two_way_travel ns
2 2024-08-18 pulseEkko pro 1 GHz GPR two_way_travel ns
3 2024-08-18 pulseEkko pro 1 GHz GPR two_way_travel ns
4 2024-08-18 pulseEkko pro 1 GHz GPR two_way_travel ns
observers
0 Randall Bonnell
1 Randall Bonnell
2 Randall Bonnell
3 Randall Bonnell
4 Randall Bonnell
[5 rows x 23 columns]
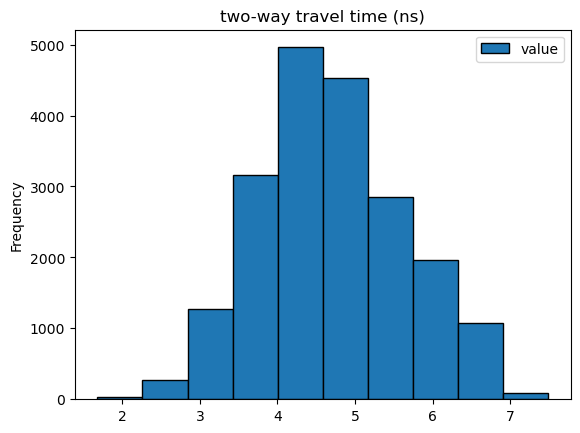
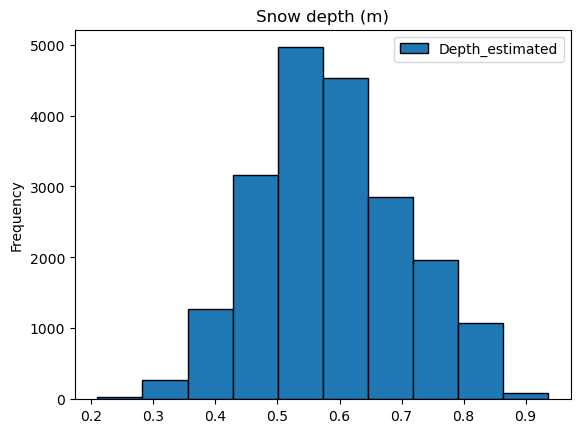
# Let's look at the distribution of gpr two-way travel times and estimated snow depths
#Estimate snow depths from twt by assuming a velocity of 0.25 m/ns --> Is this an appropriate velocity estimate?
flcf_gpr_df['Depth_estimated'] = (flcf_gpr_df['value']/2)*0.25
ax1 = flcf_gpr_df.plot.hist(column=["value"], edgecolor='black', title='two-way travel time (ns)')
ax2 = flcf_gpr_df.plot.hist(column=["Depth_estimated"], edgecolor='black', title='Snow depth (m)')
#Extract x/y limits from GPR data --> these will be used when loading the lidar snow depths
bounds = flcf_gpr_df.total_bounds
# Create a bounding box
gpr_limits = box(*bounds)
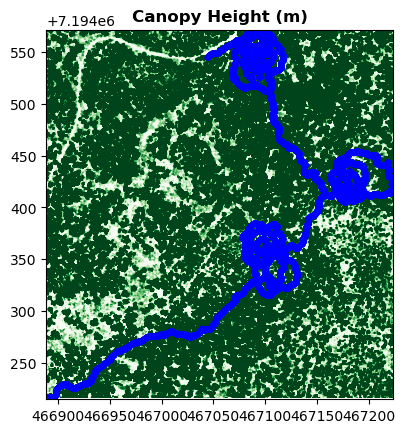
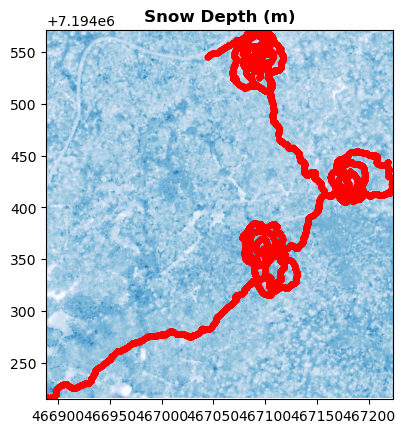
Let’s load in the lidar canopy heights and snow depths.#
We’ll look at the canopy heights to get an idea of what kind of forest the data were collected in.
Then, we’ll look at the lidar snow depths to visualize the snow distribution.
Discussion questions:#
What type of survey design was implemented for the GPR?
Do the lidar snow depth patterns seem to exhibit any kind of dependence upon the forest cover?
# 1.3 Load Lidar vegetation/canopy heights --> This may take a few minutes
#Read in the canopy heights raster from Farmer's Loop/Creamer's Field Alaska
flcf_ch = RasterMeasurements.from_area(shp = gpr_limits, crs=26906,
buffer=None, type='canopy_height',
site_name='farmers-creamers',
observers='chris larsen')
print(flcf_ch)
#Plot the datasets
fig, ax = plt.subplots()
show(flcf_ch, ax=ax, cmap='Greens', clim=(0,5), title = 'Canopy Height (m)')
#Plot the GPR points on top
flcf_gpr_df.plot(ax=ax, color='blue', markersize = 10)
<open DatasetReader name='/vsimem/8bbf086d-1ba0-4004-b5b6-ccb2a32d15f5/8bbf086d-1ba0-4004-b5b6-ccb2a32d15f5.tif' mode='r'>
<Axes: title={'center': 'Canopy Height (m)'}>
# 1.4 Load Lidar Snow depths --> This will take a few minutes
#Read in the canopy heights raster from Farmer's Loop/Creamer's Field Alaska
flcf_ds = RasterMeasurements.from_area(shp = gpr_limits, crs=26906,
buffer=None, type='depth',
site_name='farmers-creamers',
observers='chris larsen')
#Plot the datasets
fig, ax = plt.subplots()
show(flcf_ds, ax=ax, cmap='Blues', clim=(0,1.5), title='Snow Depth (m)')
#Plot the GPR points on top
flcf_gpr_df.plot(ax=ax, color='red', markersize = 10)
<Axes: title={'center': 'Snow Depth (m)'}>
Part 2: Match the GPR data to the lidar grid and derive relative permittivity and density#
There are two conceptual paths forward:
Rasterize the GPR data or
Vectorize the lidar data
For simplicity, the following code:
vectorizes the lidar data
performs a nearest neighbor search between the lidar and GPR coordinate vectors
Calculates the median GPR twt from the nearest neighbors
Derives relative permittivity and density from the lidar snow depths and median twt
We need to know the resolutions of the lidar and GPR datasets#
The GPR dataset consists of points that are spaced ~0.10 m apart.
What about the lidar? Run the code block below to answer this question.
How many GPR points would you expect to have per lidar pixel? Assume linear transects through each pixel.
#2.1 Let's learn a bit about the resolution of the lidar rasters
height, width = flcf_ds.read(1).shape #Find the height and width of the array
#Use meshgrid to create two arrays matching the height/width of the input raster
#The GPR dataset consists of vectors --> we will eventually need to vectorize these lidar arrays
cols, rows = np.meshgrid(np.arange(width), np.arange(height))
#Extract the easting/northing from the raster
x_lidar, y_lidar = rio.transform.xy(flcf_ds.transform, rows, cols)
#What's the resolution of the lidar dataset?
print("The x resolution of the snow depth raster is:",x_lidar[0][1]-x_lidar[0][0])
print("The y resolution of the snow depth raster is:",y_lidar[0][0]-y_lidar[1][0])
The x resolution of the snow depth raster is: 0.5
The y resolution of the snow depth raster is: 0.5
# 2.2 Matching GPR to the lidar grid
#Two conceptual paths forward: rasterize the GPR data, or convert lidar data to points
#Let's vectorize the raster data
x_lidar_vec = np.array(x_lidar).flatten()
y_lidar_vec = np.array(y_lidar).flatten()
flcf_ds_vec = flcf_ds.read().flatten()
#Pull vectors from geo dataframe
gpr_arr = np.stack([flcf_gpr_df.geometry.x, flcf_gpr_df.geometry.y,flcf_gpr_df['value']], axis=1)
gpr_x=gpr_arr[:,0]
gpr_y=gpr_arr[:,1]
gpr_twt=gpr_arr[:,2].reshape(len(gpr_arr[:,2]),1)
#2.3 Create sets of coordinates for the nearest neighbors search
coordinates_set1 = np.column_stack((x_lidar_vec,y_lidar_vec))
coordinates_set2 = np.column_stack((gpr_x,gpr_y))
# Build KDTree from the second set of coordinates
tree = cKDTree(coordinates_set2)
# Define the radius (in meters)
radius = 0.25
# Function to find the median of travel times within a radius --> Credit where credit is due, this function was generated in part by chatgpt
def find_median_travel_time_within_radius(point, tree, coordinates_set1, gpr_twt, radius):
indices = tree.query_ball_point(point, radius)
if indices:
# Retrieve travel times for the nearest neighbors
neighbor_twt = gpr_twt[indices]
median_twt = np.median(neighbor_twt)
return median_twt
else:
return np.nan # Return NaN if no neighbors are within the radius
# Find medians for each lidar point
medians = np.array([find_median_travel_time_within_radius(point, tree, coordinates_set2, gpr_twt, radius) for point in coordinates_set1])
The GPR data is not as spatially continuous as the lidar data, so most of the median twt dataset consists of nan’s#
Let’s remove the nan’s to free up memory and reduce processing time.
#At this point, all lidar points should have an associated gpr twt --> most are likely nan's though. But let's check!
print("The gpr array has size:",medians.shape)
print("The lidar array has size:",flcf_ds_vec.shape)
The gpr array has size: (478380,)
The lidar array has size: (478380,)
#2.4 Before we get to the math part, let's clear out the nan's from all important vectors:
#Create mask for gpr medians that are nan's
mask = np.isnan(medians)
#Remove entries from the lidar snow depth, x, and y vectors that align with the nan twt values
flcf_ds_vec_clean = flcf_ds_vec[~mask]
coordinates_set1_clean=coordinates_set1[~mask]
#Lastly, remove entries from the twt medians
medians_clean = medians[~mask]
#Let's check the new size of the twt array
print(medians_clean.shape)
(3788,)
Discussion questions:#
Roughly, how many points were removed?
When we are done, we will have derived 3788 snow density estimates. In the same area, about four snow pits were dug, resulting in four bulk density measurements. How useful do you think our data will be?
Is more always better?
Let’s now transition to the relative permittivity and density calculations#
#2.5 We finally get to the math part!!
#Let's calculate relative permittivity first...
c=0.2998#The speed of light in a vacuum
e_s = ((c * medians_clean) / (2 * flcf_ds_vec_clean)) ** 2
#And then calculate density
rho_s = ((np.sqrt(e_s) - 1) / 0.845) * 1000
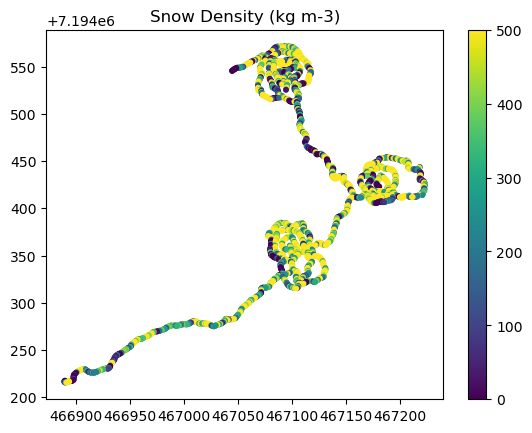
Part 3: Examining the derived densities#
# 3.1 Finally, let's take a peek at what the derived densities look like...
plt.figure()
plt.scatter(coordinates_set1_clean[:,0], coordinates_set1_clean[:,1], s=10, c=rho_s, cmap='viridis', clim=(0, 500), edgecolor=None)
# Add colorbar to show the scale of color values
plt.colorbar()
plt.title('Snow Density (kg m-3)')
# Show the plot
plt.show()
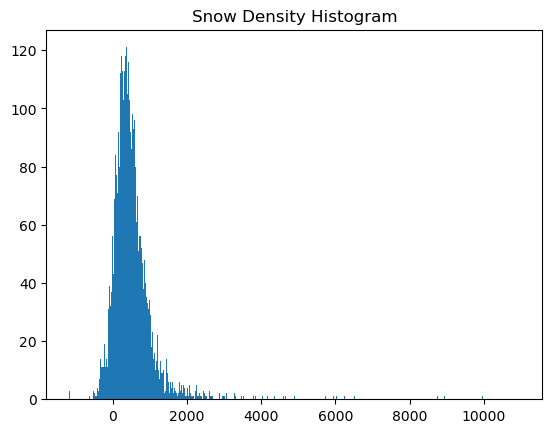
# 3.2 What does the histogram distribution look like??
# Define bin edges
bin_edges = np.arange(np.min(rho_s), np.max(rho_s), 25) # Create bin edges from min(x) to max(x) with step size 25
# Create the histogram
plt.figure() # Create a new figure
plt.hist(rho_s, bins=bin_edges, edgecolor=None) # Plot histogram with specified bin edges
plt.title('Snow Density Histogram')
# Show the plot
plt.show()
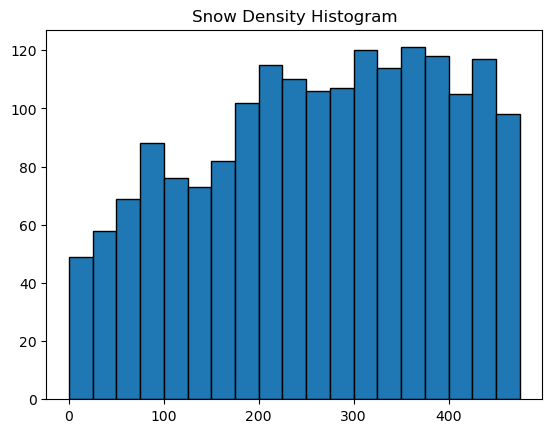
#Let's zoom in a little...
# Define bin edges
bin_edges = np.arange(0, 500, 25) # Create bin edges from min(x) to max(x) with step size 25
# Create the histogram
plt.figure() # Create a new figure
plt.hist(rho_s, bins=bin_edges, edgecolor='black') # Plot histogram with specified bin edges
plt.title('Snow Density Histogram')
# Show the plot
plt.show()
5. Discussion: Improving Density Estimation#
What do you think? Do the derived densities look usable at this stage?
What contributes to the random error?#
There are three groups of factors that control the random error:
Measurement accuracy for lidar snow depths and GPR twt. Reduced accuracy for either or both of the techniques will lead to large errors. The boreal forest had a lot of complex vegetation that may have impeded the accuracy of these instruments.
Depth of the snowpack. The accuracy of the lidar is not a function of snow depth. Thus, the random errors reduce as the snow depth increases. The boreal forest snow depths were shallow!
Geolocation alignment. GPR coordinates were post-processed, but accuracy is still likely on the order of ±3 m.
Improving the derived densities#
Let’s say we want to learn something about snow density in the boreal forest. The derived densities offer a HUGE increase in the number of available density measurements compared to in situ. But, in situ are much more accurate. How can we improve this dataset?
Increase the footprint of the derived densities by upsampling the lidar (e.g., to 3 m).
This will reduce the impact of GPR geolocation accuracy and the lidar/GPR observation uncertainty.
Need to be careful! The GPR footprint is large, but it may not scale well past 3 m.
Remove erroneous values.
How does the lidar survey time compare with the GPR survey time? Was the snow disturbed or did more snow accumulate between surveys?
Relative permittivity of snow cannot be less than air \((\epsilon_a = 1.0)\) or greater than liquid water \((\epsilon_w = 88)\).
For dry snow, relative permittivity is usually between 1.0 and 2.0. The removal of values outside a certain number of standard deviations and/or the interquartile range may be warranted.
Run a spatial averaging filter.
Our surveys were primarily spirals –> should pair nicely with such a filter!
Experiment with the window size of the filter. How would a 5 m x 5 m filter compare to a 25 m x 25 m filter?
Should the data be parsed into different forest cover classes before such a filter is run?
Be careful of linear transects! Large windows tend to remove any density variability along such transects.
Once you reach this point, it is likely that the densities will be analysis ready. You could run a predictive model to fill in the void spaces, use the densities to evaluate models, calculate experimental variograms, etc.
6. SnowEx GPR Analysis-Ready Datasets#
Grand Mesa, Colorado (SnowEx 2017, 2020)
Webb et al. (2019). https://doi.org/10.5067/G21LGCNLFSC5
Bonnell et al. (2021). https://doi.org/10.5067/S5EGFLCIAB18
Meehan (2021). https://doi.org/10.5067/Q2LFK0QSVGS2
Webb (2021). https://doi.org/10.5067/WE9GI1GVMQF6
Meehan & Hojatimalekshah (2024). https://doi.org/10.5067/LANQ53RTJ2DR
Cameron Pass, Colorado (SnowEx 2020, 2021)
McGrath et al. (2021). https://doi.org/10.5067/U4Q3X27BMRR4
Bonnell et al. (2022). https://doi.org/10.5067/SRWGLYCB6ZC4
Bonnell et al. (2024). https://doi.org/10.5067/W0EJNWUZBYSL
Jemez Mountains, New Mexico (SnowEx 2020)
Webb (2021). https://doi.org/10.5067/H38Q5FTBPZ8K
Arctic Coastal Plains, Alaska (SnowEx 2023)
Webb (2024). https://doi.org/10.5067/H3D9IT1W6JT6
7. References#
Lidar Datasets
Larsen (2024). https://doi.org/10.5067/BV4D8RRU1H7U
Relevant GPR LWC Studies
Webb et al. (2018). https://doi.org/10.1029/2018WR022680
Webb et al. (2020). https://doi.org/10.1002/hyp.13686
Bonnell et al. (2021). https://doi.org/10.3390/rs13214223
Webb et al. (2022). https://doi.org/10.1002/hyp.14541
Relevant GPR Density Studies
Yildiz et al. (2021). https://doi.org/10.1002/hyp.14190
McGrath et al. (2022). https://doi.org/10.3389/frsen.2022.886747
Bonnell et al. (2023). https://doi.org/10.1002/hyp.14996
Meehan et al. (2024). https://doi.org/10.5194/tc-18-3253-2024